Previous Posts:
(http://junkbots.blogspot.com/2014/08/junkbot-pi-1-scratchgpio.html) and showed a Pi controlled junkbot briefly in action (http://junkbots.blogspot.co.uk/2014/08/junkbot-raspberry-pi-2-raspberry-pi.html).
In this post I aim to discuss
- Choice of motor controller card
- Provide an example of a drawing junkbot controlled through Scratch and Raspberrry Pi
Choice of interface/Controller card
The card chosen was the 4Tronix PiRoCon card (http://4tronix.co.uk/store/index.php?rt=product/product&product_id=182). Selected for four reasons
- Price is reasonable (in my opinion).
- Fits straight onto the Pi through the GPIO - no extra cables needed.
- ScratchGPIO has it as an addon so it makes programming it even easier (see http://cymplecy.wordpress.com/2013/10/31/pirocon-from-4tronix/).
- Others are using it for robot projects.
Use it is quite easy plug the board directly on to the GPIO connector of the Raspberry Pi (4tronix provide some advice in section 15 of http://4tronix.co.uk/blog/?p=22 on mounting the board). The only other changes I needed to make because I wasn't powering the motors through the DC input I had to change the jumper settings next to Vin Connector (see http://4tronix.co.uk/blog/?p=41 for layout) to reflect this.
Example
Now for the fun bit get the whole thing to draw (see Figure 1 and the video at the end)!
The junkbot itself is made up of a drinks can, three supports (we used LEGO here but it equally could be straws, sticks), a pen/pencil, and a motor and broken propeller combination to create an unbalanced motor.
With the Raspberry Pi off, the the motor's wires are connected to the controller card at the connections for MotorA and the battery is also connected. Turn the Pi on and run ScratchGPIO5plus.
 |
| Figure 2 |
 |
| Figure 3 |
 |
| Figure 4 |
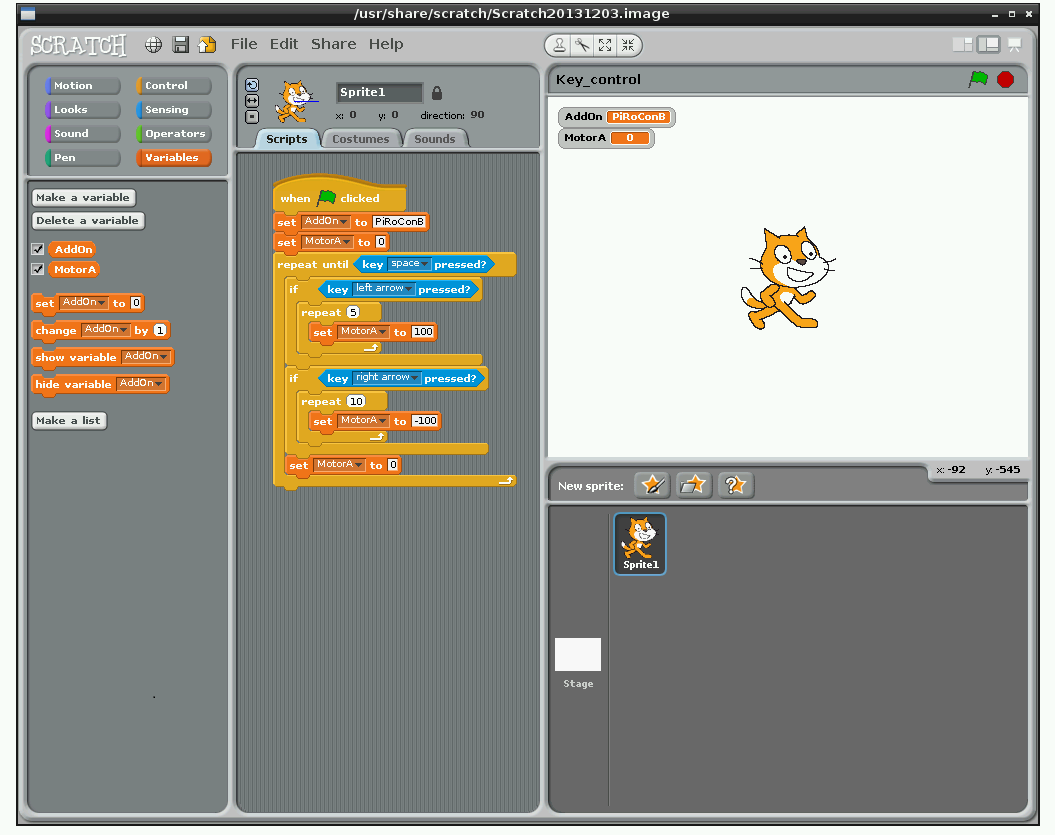
The first task is to make the variables AddOn (which will be used to tell the program we are using the PiRoCon card) and MotorA for the motor (see Figure 3).
In Figure 4 the program can be seen, essentially the left and right key spin the junkbot clockwise or anticlockwise by setting the Motor to either +ve or -ve values from 0 to 100. The space bar is used to stop the motor.
As it moves because one of the supports is a pen it draws. See the video below to watch it draw a squiggly line - control is still a challenge.
The bot was developed by Hayden Tetley and Scott Turner. Hayden's time was paid for through the Nuffield Research Placements Scheme (http://www.nuffieldfoundation.org/nuffield-research-placements).
Related Link
Junkbot Raspberry Pi: 1 ScratchGPIO
Junkbot Raspberry Pi: 2 Raspberry Pi Junkbot in action
If you would like to know more about the Junkbots project contact scott.turner@northampton.ac.uk. The views and opinions is the authors and should not be taken as representing the views of any organisation the author is associated with.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.

Thanks.......
ReplyDeleterobot kit
Robotics in Education
Educational robotics
I am learning same from many days and have done many research on this found very useful information on this blog thank you! author and team.
ReplyDeleteiot training hyderabed