Michael Welsh
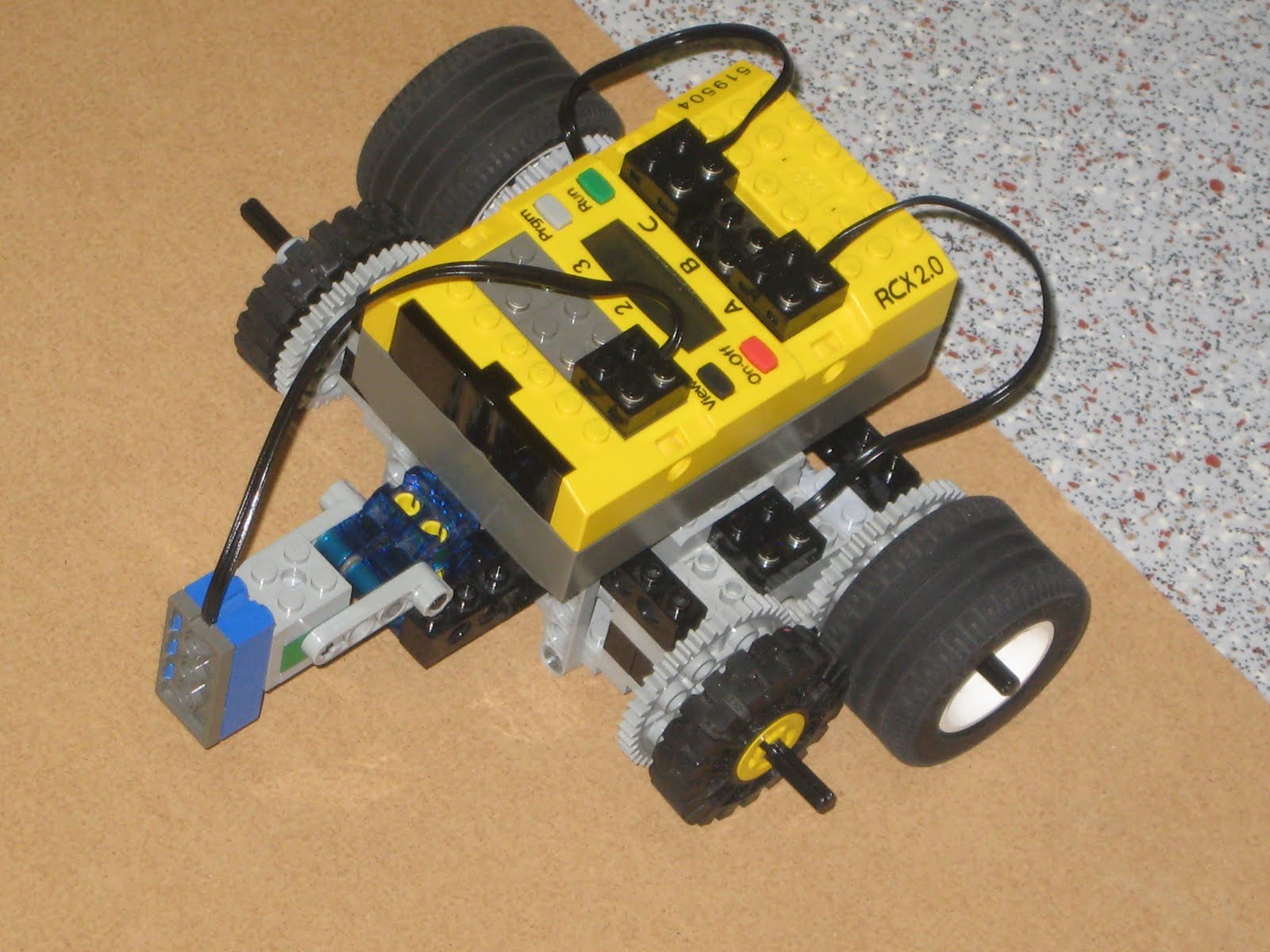
Michael has been working on using a micro:bit based bitbot from 4tronix to produce a potential teaching tool; an example of artificial neurons used control a robot. The aim is for this tool to be used with 3rd-year Undergraduates, as part of a module on Artificial Intelligence.
Michael's solution was to use the computer to run and train a single neuron; then for the robot to send values from the line sensors back to the program running on a Computer and receive control signals.
Sounds easy? No really, in the end, the software running on the computer had to also send and receive the data through a microbit (via USB) and then use radio to communicate with the bit:bot robot. All the various developed parts of the solution were implemented in Python by Michael.
Michael's solution was to use the computer to run and train a single neuron; then for the robot to send values from the line sensors back to the program running on a Computer and receive control signals.
Sounds easy? No really, in the end, the software running on the computer had to also send and receive the data through a microbit (via USB) and then use radio to communicate with the bit:bot robot. All the various developed parts of the solution were implemented in Python by Michael.

import serial
from math import fabs
import random
import sys
import glob
#TO DO: GUI, implement manual mode. Make manual mode a button?? When in automatic, weight boxes are greyed out. Otherwise, they are able to be typed into.
def forward(n):
microbit.write(('f'+str(n)).encode('utf-8'))
def backward(n):
microbit.write(('b'+str(n)).encode('utf-8'))
def turnR(n):
microbit.write(('r'+str(n)).encode('utf-8'))
def turnL(n):
microbit.write(('l'+str(n)).encode('utf-8'))
def end():
microbit.write('e'.encode('utf-8'))
def serial_ports():
""" Lists serial port names
:raises EnvironmentError:
On unsupported or unknown platforms
:returns:
A list of the serial ports available on the system
"""
if sys.platform.startswith('win'):
ports = ['COM%s' % (i + 1) for i in range(256)]
elif sys.platform.startswith('linux') or sys.platform.startswith('cygwin'):
# this excludes your current terminal "/dev/tty"
ports = glob.glob('/dev/tty[A-Za-z]*')
elif sys.platform.startswith('darwin'):
ports = glob.glob('/dev/cu.*')
else:
raise EnvironmentError('Unsupported platform')
result = []
for port in ports:
try:
s = serial.Serial(port)
s.close()
if '/dev/cu' in port:
if '/dev/cu.usbmodem' in port:
result.append(port)
else:
result.append(port)
except (OSError, serial.SerialException):
pass
return result
class neuron:
def __init__(self,ins):
self.inputs = [1]
self.weights = []
for i in range(ins+1):
self.weights.append(random.uniform(-1,1))
#print(self.weights)
self.LC = 0.005
def get_output(self,inputs):
self.inputs = [1]+inputs
WSum = 0
for i in range(len(self.inputs)):
WSum += int(self.inputs[i]) * self.weights[i]
sums = sorted([fabs(WSum), fabs(WSum - (1/3)), fabs(WSum-(2/3)), fabs(WSum-1)])
#print(sums)
if sums[0] == fabs(WSum): #return 0 - move backwards
backward(5)
return 'B',WSum
elif sums[0] == fabs(WSum - (1/3)):
turnR(5)
return 'R', WSum
elif sums[0] == fabs(WSum - (2/3)):
turnL(5)
return 'L', WSum
else:
forward(20)
return 'F', WSum
def train(self,inputs,desired):
result = self.get_output(inputs)[1]
print(result)
error = desired - result
#print(error)
for w in range(len(self.weights)):
change = self.LC * int(self.inputs[w]) * error
print('change in weight ' + str(w) + ': ' + str(change))
self.weights[w] += change
for i in serial_ports():
try:
microbit = serial.Serial(port=i, baudrate=115200)
break
except:
pass
microbit.setDTR(1)
microbit.close()
microbit.open()
control = neuron(2)
mode = input('Automatic or Manual? (A/M)\n')
while mode.lower() not in ['a','m']:
mode = input('Automatic or Manual? (A/M)\n')
if mode == 'm':
control.weights[0],control.weights[1],control.weights[2] = int(input('Enter weight 0/bias: ')),int(input('Enter weight 1: ')), int(input('Enter weight 2: '))
while True:
#microbit.write(input('input: ').encode('utf-8'))
out = microbit.read(6)
microbit.flush()
try:
out = out.decode()
except:
pass
for i in range(len(out)):
if str(out[i]) in ['0','1']:
if i == 0:
if out[1] == ']':
num2 = out[i]
elif out[1] == ',':
num1 = out[i]
elif i == 5:
if out[4] == '[':
num1 = out[i]
elif out[4] == ' ':
num2 = out[i]
else:
if out[i-1] == '[':
num1 = out[i]
elif out[i-1] == ' ':
num2 = out[i]
elif out[i+1] == ']':
num2 = out[i]
elif out[i+1] == ',':
num1 = out[i]
#print(out)
try:
sleft=int(num1)
sright=int(num2)
print([sleft, sright])
if mode == 'a':
if [sleft, sright] == [0, 0]:
control.train([sleft,sright],0)
elif [sleft, sright] == [0, 1]:
control.train([sleft,sright], 1/3)
elif [sleft,sright] == [1, 0]:
control.train([sleft,sright], 2/3)
else:
control.train([sleft,sright], 1)
else:
if [sleft, sright] == [0, 0]:
control.get_output([sleft,sright])
elif [sleft, sright] == [0, 1]:
control.get_output([sleft,sright])
elif [sleft,sright] == [1, 0]:
control.get_output([sleft,sright])
else:
control.get_output([sleft,sright])
except:
pass
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with. Twitter @scottturneruon