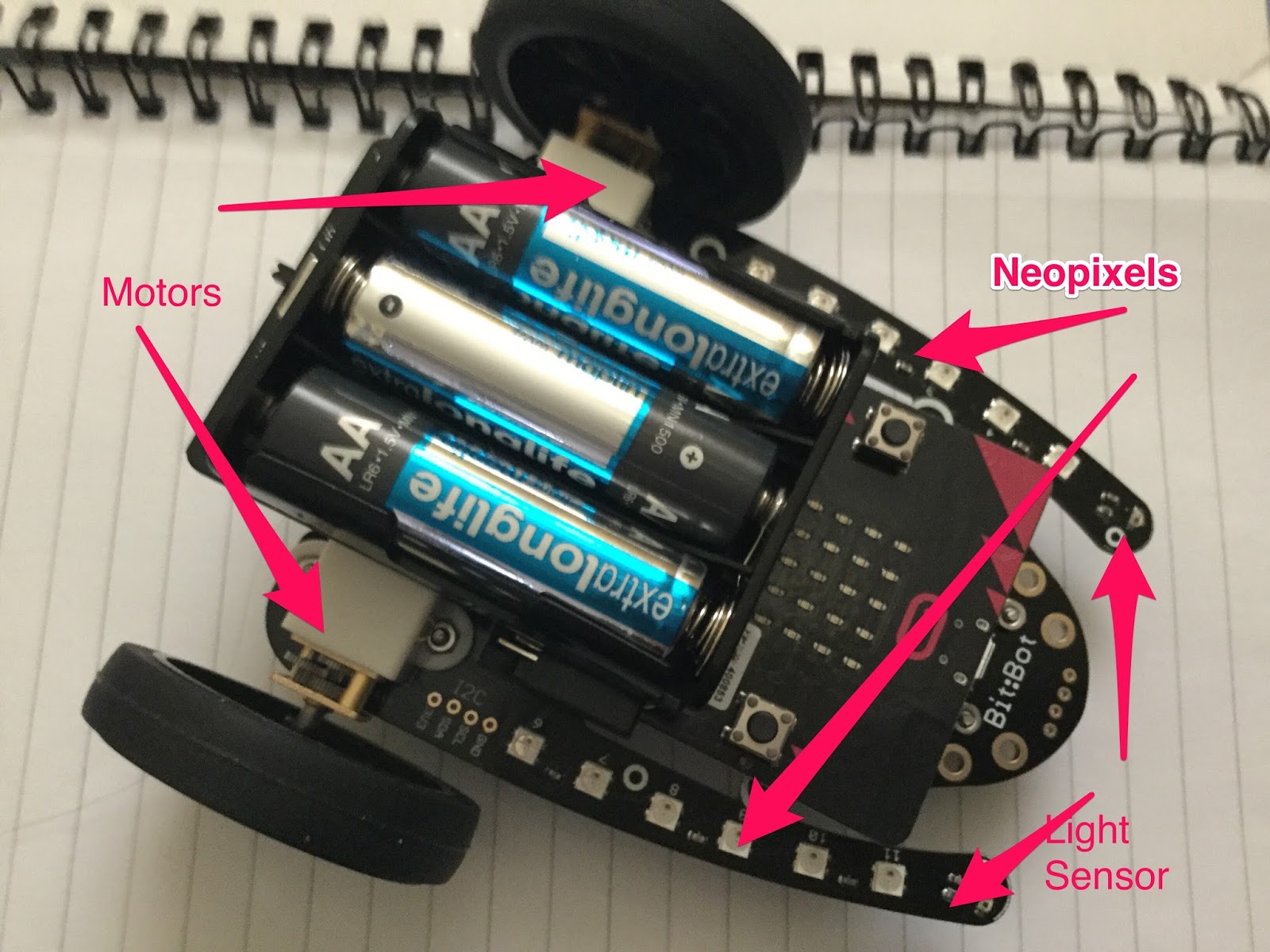
It is based around fours motors, control by a Micro:Bit, via L298N based motor controller/shield. Batteries power, 8 AAs, the motors and a Lithium powerbank to power the Micro:Bit - all included.
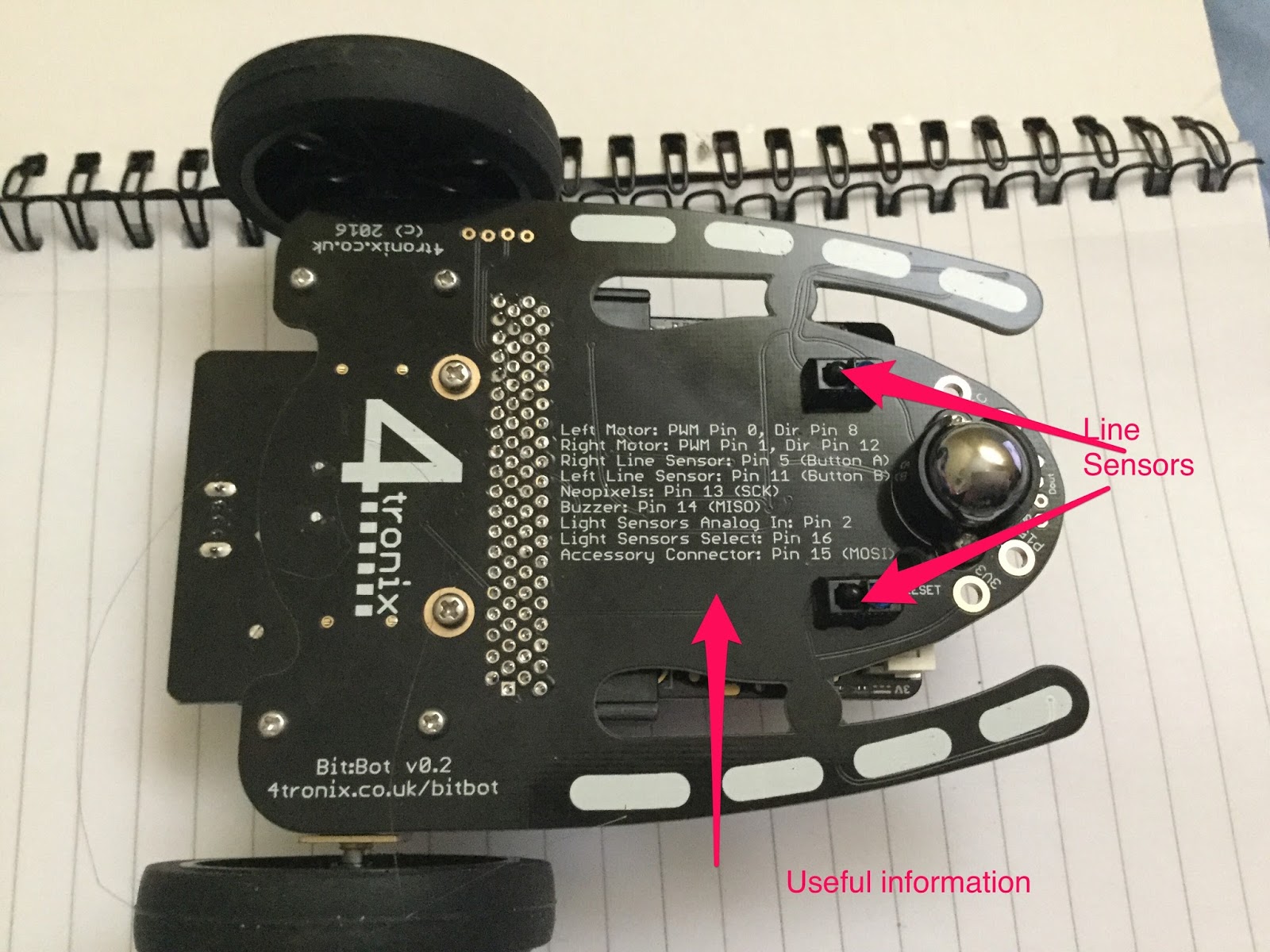
More information about the technical details and example software can be found on their site https://www.cbis.education/robotic-car-kit# including further details on the L298N based motor controller/shield, which I found useful for programming it.


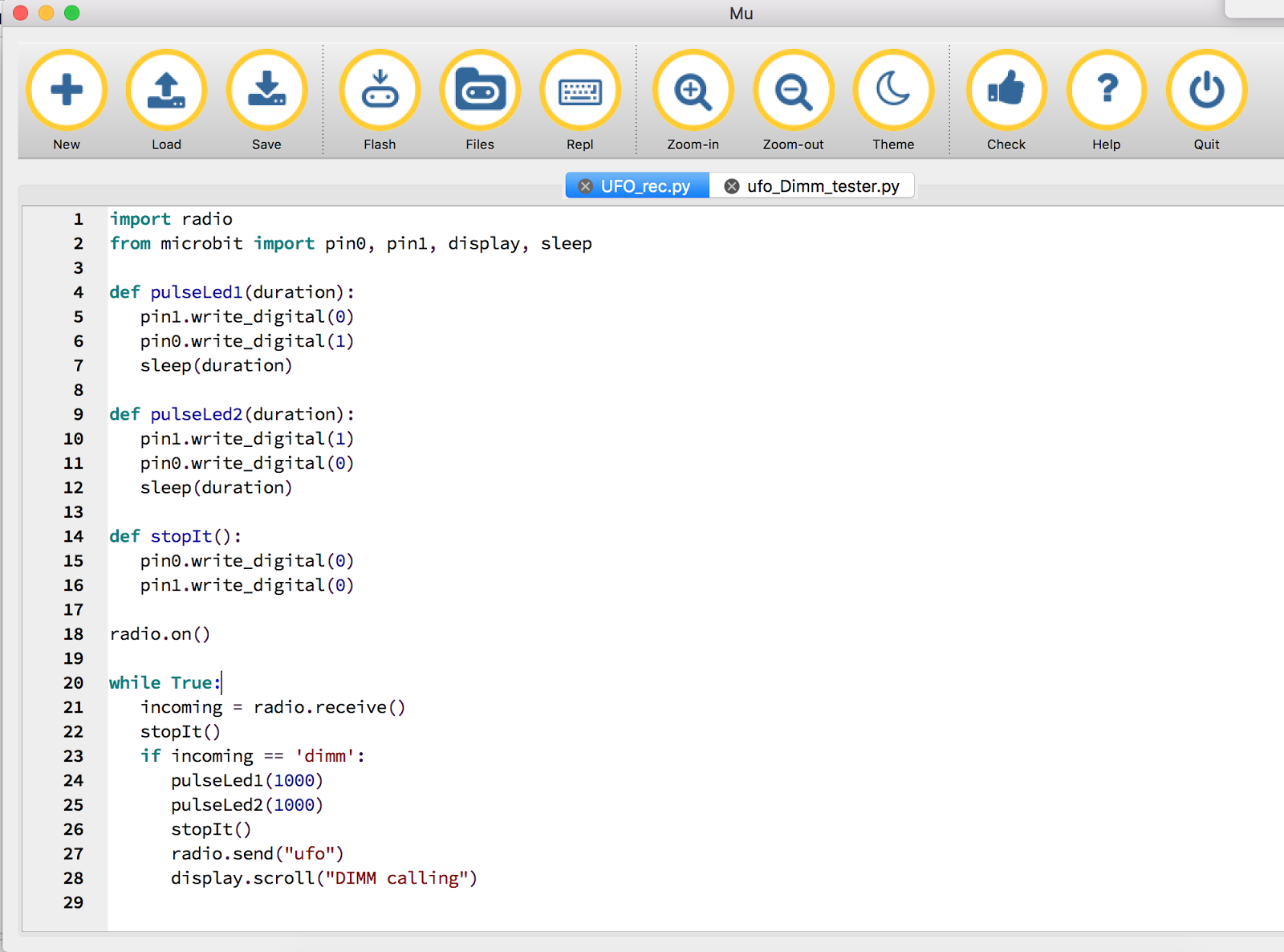
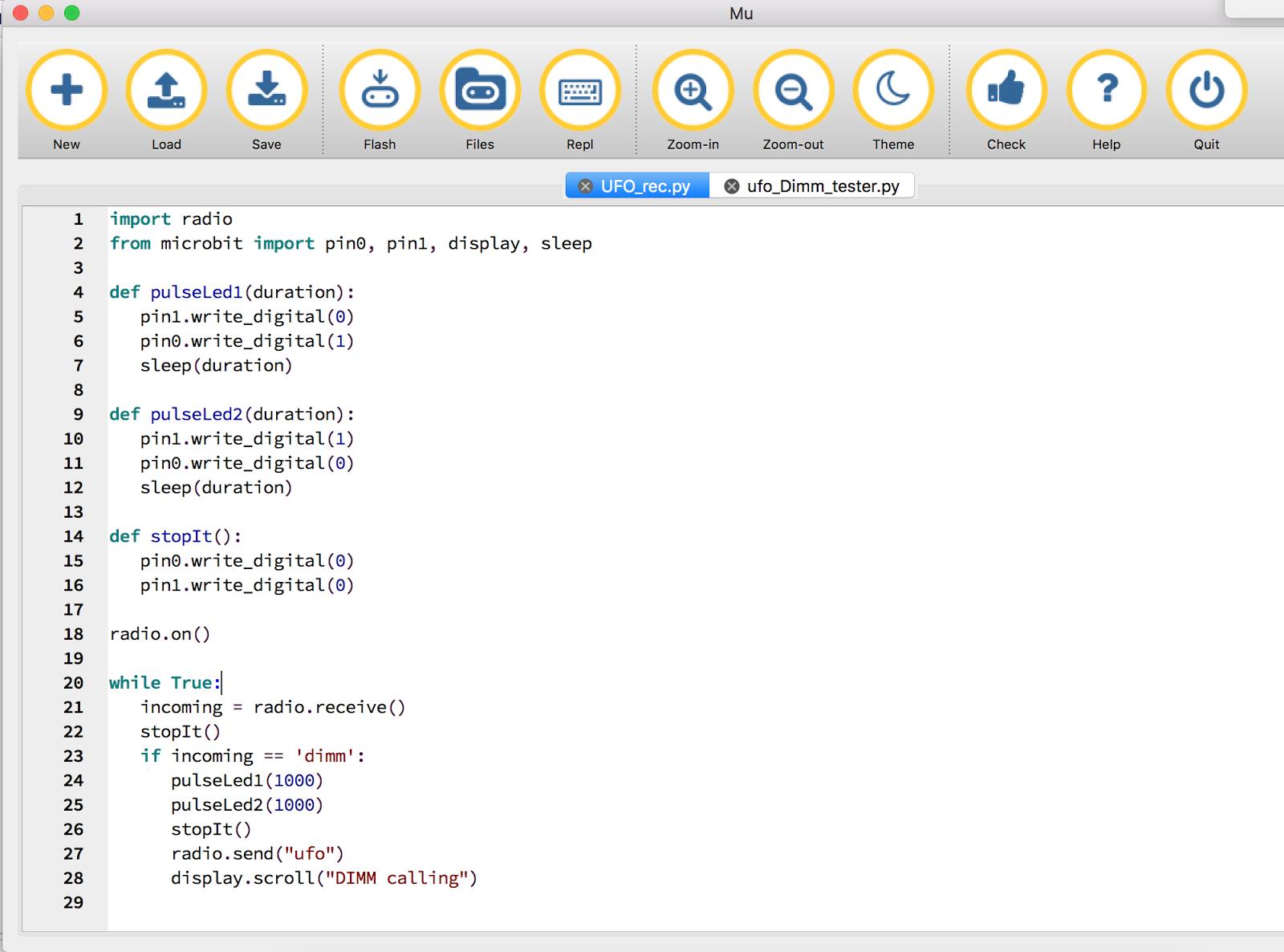
I have experimented briefly with programming it in Python (micropython), getting it to it move forward, backward; to the right and left, using the Mu editor.
The code is shown below for those who want to try it:
from microbit import *
def forward(n):
pin13.write_digital(1)
pin16.write_digital(1)
sleep(n)
def backward(n):
pin14.write_digital(1)
pin15.write_digital(1)
sleep(n)
def stopit(n):
pin13.write_digital(0)
pin14.write_digital(0)
pin15.write_digital(0)
pin16.write_digital(0)
sleep(n)
def spinLeft(n):
pin13.write_digital(1)
pin15.write_digital(1)
sleep(n)
def spinRight(n):
pin14.write_digital(1)
pin16.write_digital(1)
sleep(n)
while True:
forward(500)
stopit(1000)
backward(500)
stopit(1000)
spinRight(1000)
stopit(1000)
spinLeft(1000)
stopit(1000)
This thing is quick. I like the feel of it, you pick it up and it doesn't feel like it is going to fall apart; because it comes all assembled - including batteries, it is ready to go. I look forward to trying some more ideas on it.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with. Twitter @scottturneruon