What is a CrumbleBot
The CrumbleBot (http://4tronix.co.uk/store/index.php?rt=product/product&product_id=493) is based around the Redfern Electronic's Crumble Controller (http://redfernelectronics.co.uk/crumble/) and Crumble software (http://redfernelectronics.co.uk/crumble-software/); providing an intuitive graphical interface (similar to Scratch) to control two motors and four inputs/outputs. The CrumbleBot comes with a number sensors including line-detecting sensors and Light-Dependent Resistors for light detection and you use crocodile clips to connect the sensors to the inputs/outputs. In essence, this is nice little framework for simple robotics and quite forgiving; the commands are kept to a minimum and loading the program to the bot is just one action. One suggestion, is to make sure you order the Crumble Controller at the same time as CrumbleBot, it is easy to forget if you haven't already got a crumble controller already.
Building the 'Bot' is relatively simple and 4Tronix have provided some easy to follow instructions on-line (http://4tronix.co.uk/crumble/CrumbleBot.pdf) that are almost foolproof (I manage to build it!).
Panning sensor
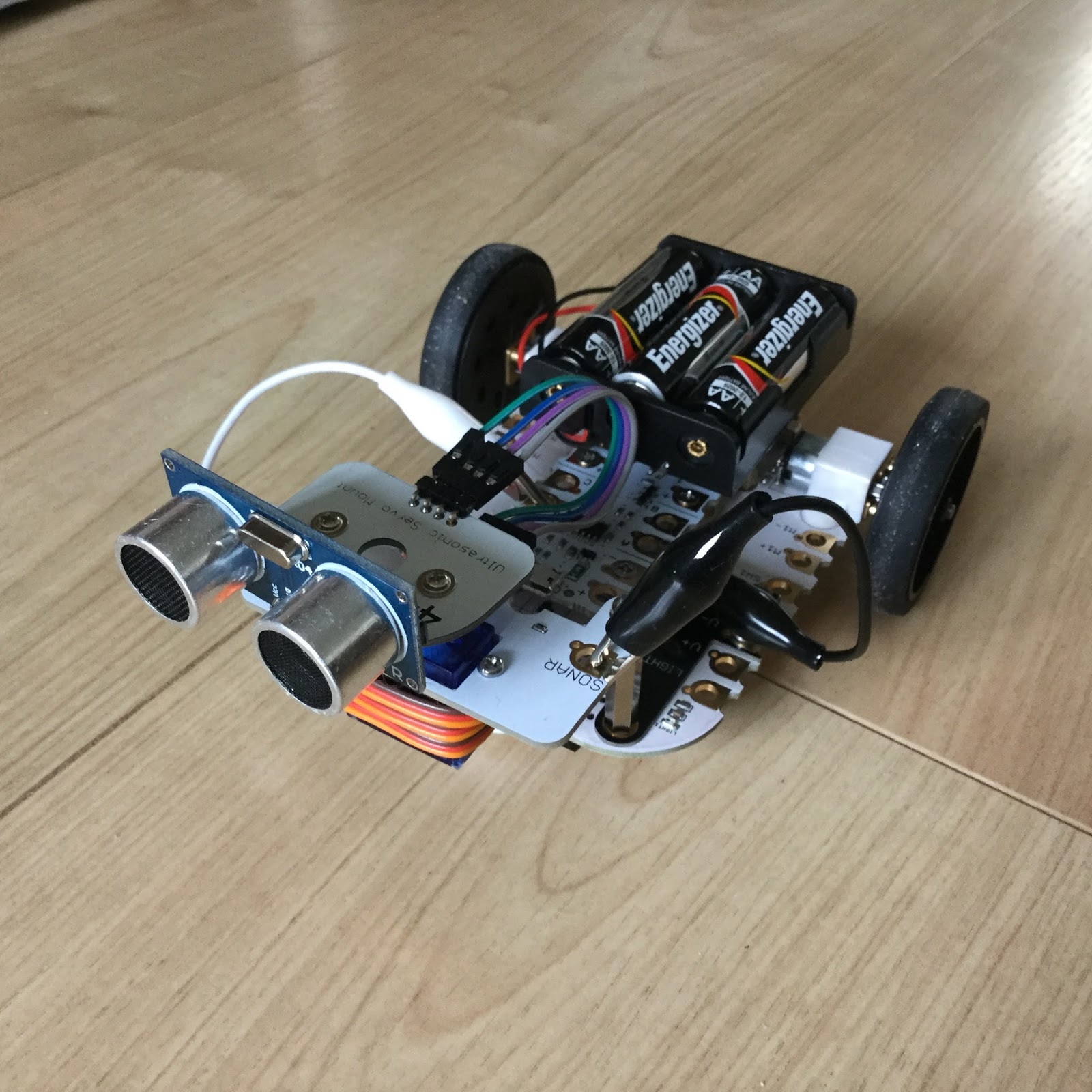
This is an add-on piece (http://4tronix.co.uk/store/index.php?rt=product/product&keyword=crumblebot&category_id=0&product_id=556), at the time of writing this costing around £12 (with VAT), which adds a ultrasonic sensor that pans and is controlled using Crumble. The instructions for setting this up are available at http://4tronix.co.uk/blog/?p=1353 you need to read from about half way down the page, they are detailed and please don't do what I did and skim through them, missing out an important action.
'Explorerbot'
The Crumblebot is built, the Panning ultrasonic sensor is connected - in my case IO port A for the servo to pan the sensor and IO port D for the input from the sensor - time to program it. The instructions in the set-up http://4tronix.co.uk/blog/?p=1353 include a useful little starting routine to read the sensor and 'zero' the sensor's position.
So my exploring routine is based around
- panning the sensor by +/-20 degrees of the sensor facing forward.
- if an object is 5cm or less from the sensor; reverse the Crumblebot and make a slight turn; otherwise move forward.
The code is shown below:

The video shows the 'Explorerbot' in action.
Conclusion
It is good fun; this is a relatively simple problem but still fun. The Crumble language is Scratch-like and simple to set up and use. Crumble as a system I have, so far, found quite forgiving and this is useful - less fear of making a mistake.The panning sensor gives this already cute robot an even cuter look. Please feel free to add the discussion using the comment section.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with. Twitter @scottturneruon
