therefore, the search has been on for a tool that allows robots to be simulated, programmed, ideally web-based, free and simple to use. Lately, a number of interesting tools have arisen. In this series of posts, I am going to look at experimenting with a few of them. In this post, starting by looking at VEXCode VR - available at https://vr.vex.com/.
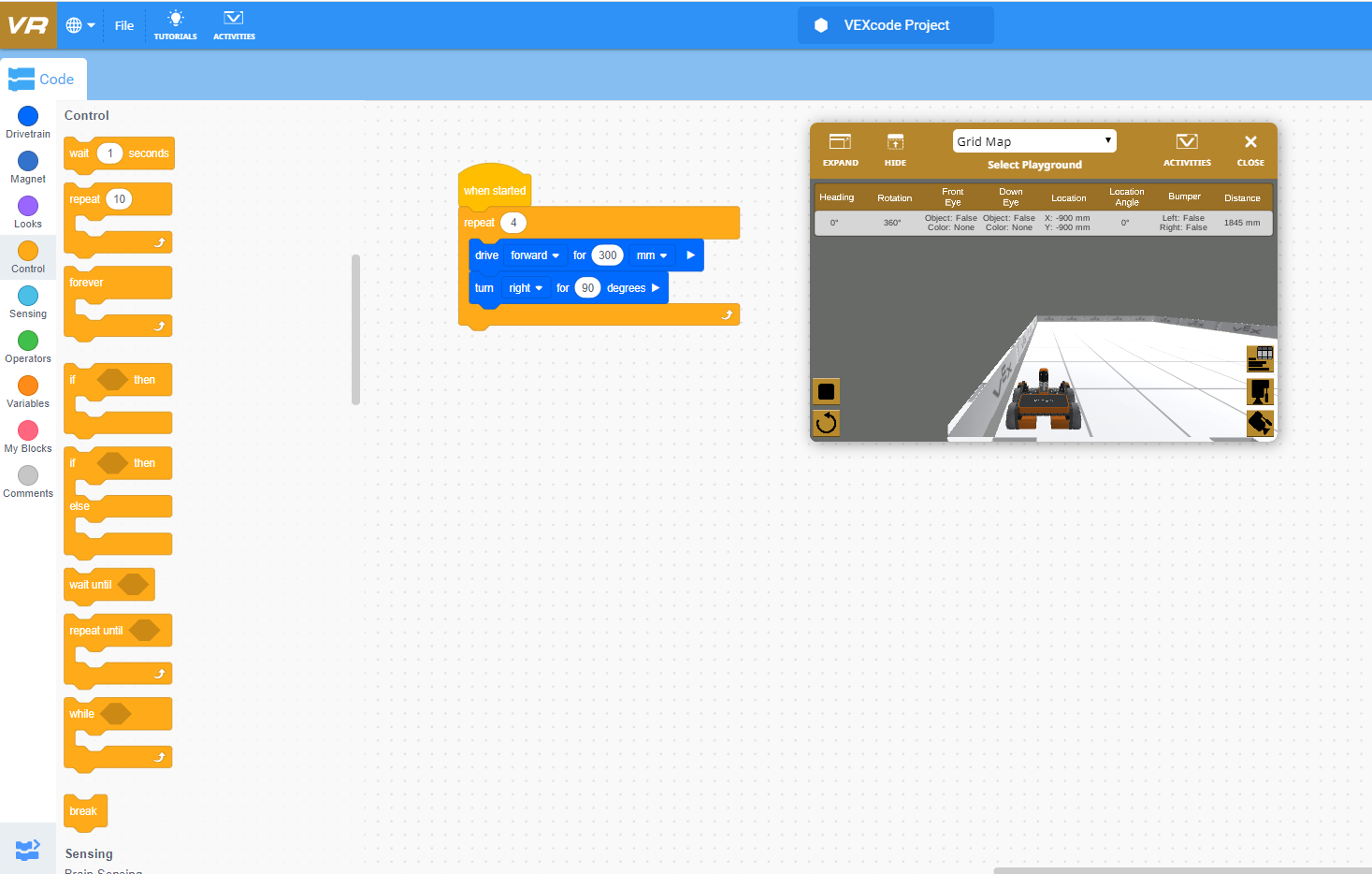
VEXcode VR https://vr.vex.com/ from VEX Robotics (https://www.vexrobotics.com/) is a simulator and programming tool for their Scratch-like programming tool VEXCode - at the time of writing is free. If you can do Scratch this is a nice next stage, consisting of the simulator (playground) and the programming environment (see below and the video above.)
Playgrounds
These are the simulated environments you can select from, with a two camera-views; downward camera for overhead view and angled camera to give a 3D view (as shown in the video) via buttons on the bottom right hand side of the playground. Also you can toggle, using the third button on the right hand side, the ability to see the status of the various sensors. There are a number of different playgrounds to play with. In this post I am going to use two of them
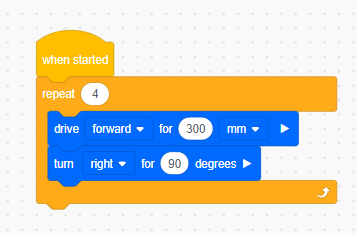
Example 1: The Square
Using the Grid Map playground and angled camera. I wanted to start with a stand-by; getting the robot to move in a square. The robot moves forward for 30mm and then turns right 90 degrees; and this is repeated 4 times (see below)
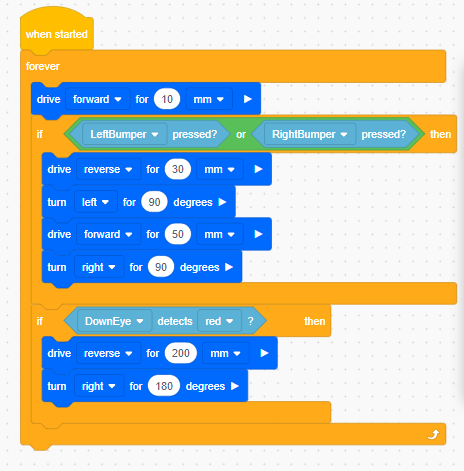
Example 2: Playing with Sensors a bit
Now for more fun, getting it to react to the environment a bit; by changing the Playground to Castle Crasher you get an environment that has simulated blocks and red perimeter to interact with. As you would hope, there are sensing blocks including LeftBumper and RightBumper - no guesrss for what they do and DownEye which can detect the red line. The code is simple and shown below, based on detecting the block using the bumpers, move to the side and recheck if (shown below) is if a block is in-front and if not go forward. If it finds the red line reverse back and rotates 180 degrees.

As a side project I wondered what would happen if you didn't put code in to detect the red line, how would it cope with falling off the surface; it simulates it quite well showing it falling off which quite fun. One mistake I made initially is accidentally selecting the wrong form of turning action rotating when it should have been a turn.
Overview so far...
If you can already use movement, sensing and control blocks in Scratch, you can do this. Has potential as a source of online activity's, especially as the time of writing in the UK we are 'social-distancing'. In their paper Turner and Hill (2008) also highlighted that robots are a difficult resource to manage for a large class; this kind of option allows simulation and programming of a robot to be tried out without actually having the robot. Most importantly it is fun.
Reference
Turner S and Hill G(2008) "Robots within the Teaching of Problem-Solving" ITALICS vol. 7 No. 1 June 2008 pp 108-119 ISSN 1473-7507 https://doi.org/10.11120/ital.2008.07010108
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with. Twitter @scottturneruon


