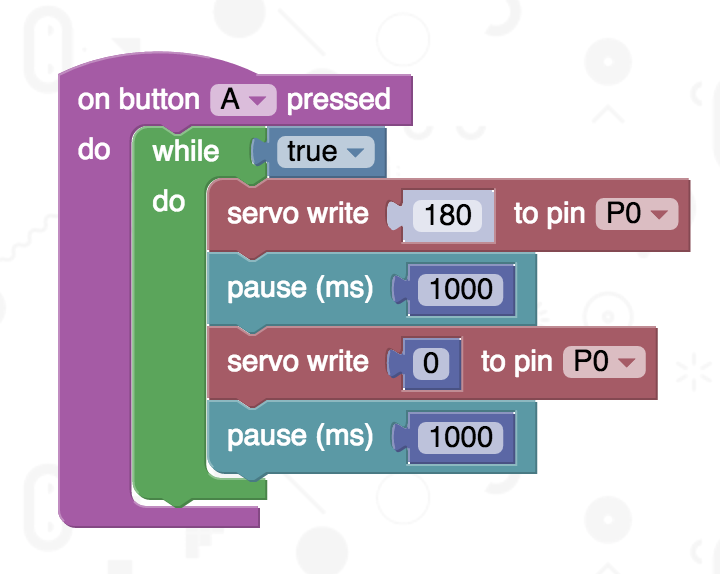
Control is via pin1(left motor) and pin2 (right motor) and the motors have to be driven in opposite directions to move forward or backwards. The direction of the motors is controlled by the analogue value written to the pins; pinX.write_analog(180) - anticlockwise or pinX.write_analog(1) - clockwise (pinX.write_analog(0) - stops the motor). Setting the analog_period seems to work at 20ms; this was found by experiment, discussed in a previous post.
So the initial code below sets up the moves for forward, backward, turn left, turn right all controlled with a move for so many milliseconds.
Code
from microbit import *
pin1.set_analog_period(20)
pin2.set_analog_period(20)
def forward(N):
pin1.write_analog(180)
pin2.write_analog(1)
sleep(N)
def backward(N):
pin1.write_analog(1)
pin2.write_analog(180)
sleep(N)
def turnLeft(N):
pin1.write_analog(1)
pin2.write_analog(1)
sleep(N)
def turnRight(N):
pin1.write_analog(180)
pin2.write_analog(180)
sleep(N)
while True:
forward(1500)
backward(1500)
turnLeft(1500)
turnRight(1500)
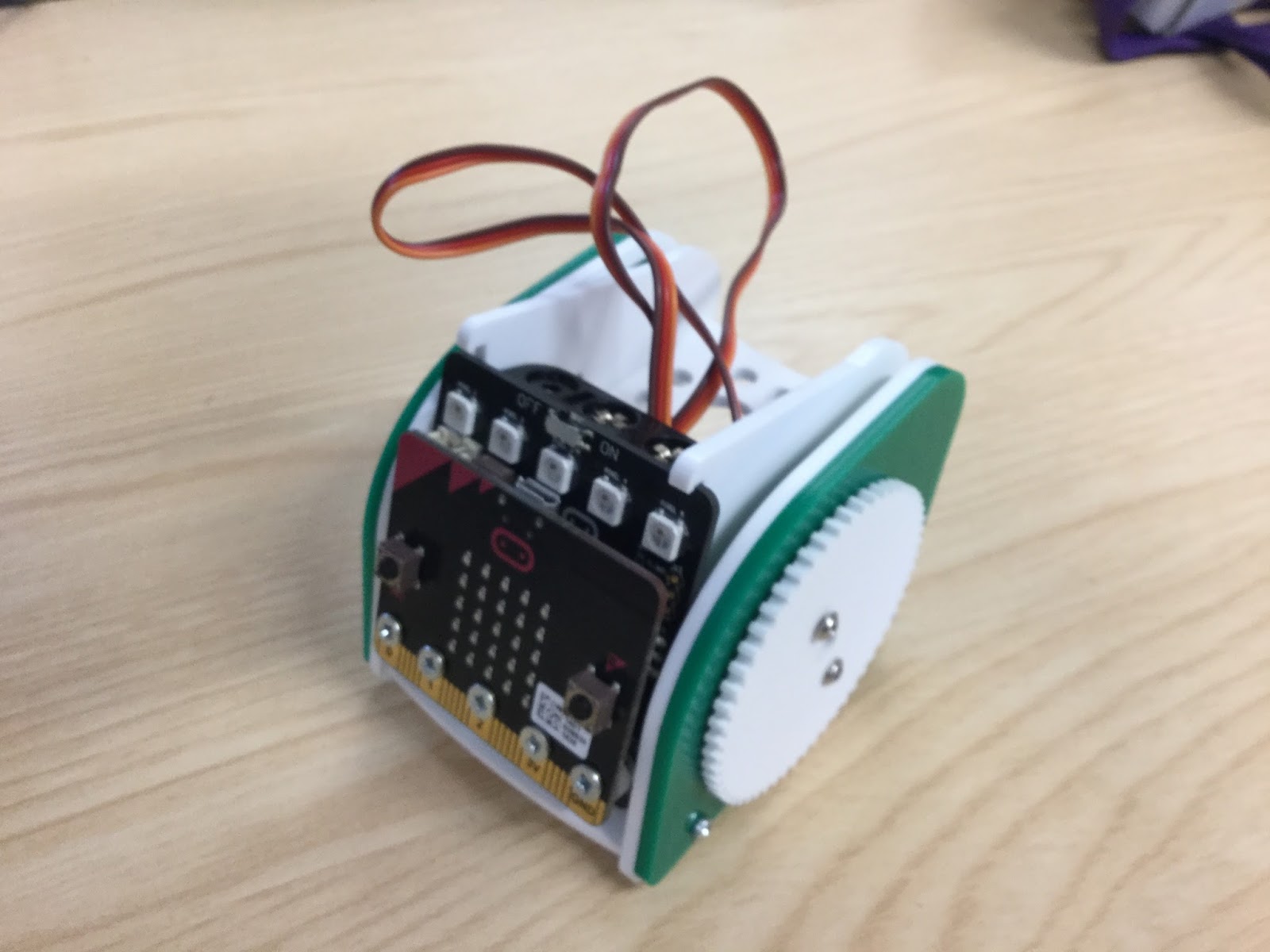
I would recommend running the :Move buggy on a surface that isn't smooth, I found the wheels slipping on a smooth surface. This is a really nice little robot to play with.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with. Twitter @scottturneruon